+




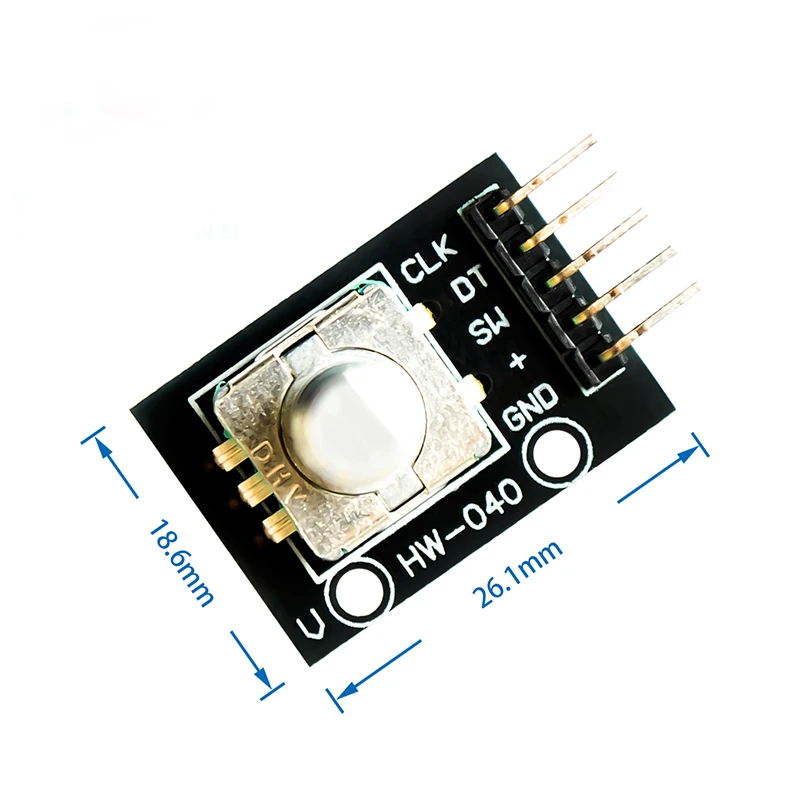
Módulo de interruptor codificador giratorio de 360 grados, KY-040, desarrollo de Interruptor de Sensor de ladrillo KY040, Kit de perilla de ómetro que para arduino
Material: Componentes electrónicos + PCB Tamaño: aproximadamente 31*19*29mm/1,22 "* 0,75" * 1,14" Color principal: negro Voltaje de funcionamiento: 5V

 Los codificadores rotativos pueden contar el número de pulsos de salida durante la rotación hacia adelante y hacia atrás a través de la rotación. A diferencia de un potenciómetro, el recuento de rotación no está limitado. Con los botones del codificador giratorio, se puede reiniciar al estado inicial, es decir, contando desde 0.
Principio de funcionamiento:
El codificador Incremental es Un sensor giratorio que convierte el desplazamiento rotacional en una serie de señales de pulso digitales. Estos pulsos se utilizan para controlar el desplazamiento angular. La conversión de desplazamiento angular en el codificador Eltra utiliza el principio de escaneo fotoeléctrico. El sistema de lectura se basa en la rotación de un disco de índice radial (Disco de código) compuesto por ventanas de transmisión de luz alternas y ventanas opacas,. Y se ilumina verticalmente mediante una fuente de luz infrarroja al mismo tiempo, y la luz proyecta la imagen del disco de código en la superficie del receptor. El receptor está cubierto con una capa de rejilla de difracción, que tiene el mismo ancho de ventana que el disco de código. El trabajo del receptor es detectar los cambios producidos por la rotación del disco, y luego convertir los cambios de luz en cambios eléctricos correspondientes. A continuación, haga que la señal de bajo nivel suba a un nivel superior y produzca un pulso cuadrado sin interferencias, que debe ser procesado por circuitos electrónicos. El sistema de lectura generalmente utiliza un método diferencial, es decir, se comparan dos señales diferentes con la misma forma de onda pero una diferencia de fase de 180 ° para mejorar la calidad y la estabilidad de la señal de salida. La lectura se forma sobre la base de la diferencia entre las dos señales, eliminando así la interferencia.
Codificador Incremental:
Los codificadores Incremental dan ondas cuadradas bifásicas, su diferencia de fase es de 90 °, generalmente llamados canal A y canal B. Uno de los canales proporciona información relacionada con la velocidad de rotación. Al mismo tiempo, las señales de los dos canales se comparan secuencialmente para obtener la información de la dirección de rotación. También hay una señal especial llamada Z o canal cero, que da la posición cero absoluta del codificador. Esta señal es una onda cuadrada que coincide con la línea central de la onda cuadrada del canal a.
Los codificadores rotativos pueden contar el número de pulsos de salida durante la rotación hacia adelante y hacia atrás a través de la rotación. A diferencia de un potenciómetro, el recuento de rotación no está limitado. Con los botones del codificador giratorio, se puede reiniciar al estado inicial, es decir, contando desde 0.
Principio de funcionamiento:
El codificador Incremental es Un sensor giratorio que convierte el desplazamiento rotacional en una serie de señales de pulso digitales. Estos pulsos se utilizan para controlar el desplazamiento angular. La conversión de desplazamiento angular en el codificador Eltra utiliza el principio de escaneo fotoeléctrico. El sistema de lectura se basa en la rotación de un disco de índice radial (Disco de código) compuesto por ventanas de transmisión de luz alternas y ventanas opacas,. Y se ilumina verticalmente mediante una fuente de luz infrarroja al mismo tiempo, y la luz proyecta la imagen del disco de código en la superficie del receptor. El receptor está cubierto con una capa de rejilla de difracción, que tiene el mismo ancho de ventana que el disco de código. El trabajo del receptor es detectar los cambios producidos por la rotación del disco, y luego convertir los cambios de luz en cambios eléctricos correspondientes. A continuación, haga que la señal de bajo nivel suba a un nivel superior y produzca un pulso cuadrado sin interferencias, que debe ser procesado por circuitos electrónicos. El sistema de lectura generalmente utiliza un método diferencial, es decir, se comparan dos señales diferentes con la misma forma de onda pero una diferencia de fase de 180 ° para mejorar la calidad y la estabilidad de la señal de salida. La lectura se forma sobre la base de la diferencia entre las dos señales, eliminando así la interferencia.
Codificador Incremental:
Los codificadores Incremental dan ondas cuadradas bifásicas, su diferencia de fase es de 90 °, generalmente llamados canal A y canal B. Uno de los canales proporciona información relacionada con la velocidad de rotación. Al mismo tiempo, las señales de los dos canales se comparan secuencialmente para obtener la información de la dirección de rotación. También hay una señal especial llamada Z o canal cero, que da la posición cero absoluta del codificador. Esta señal es una onda cuadrada que coincide con la línea central de la onda cuadrada del canal a.  La precisión de los codificadores incremental depende de los factores mecánicos y eléctricos. Estos factores son: error de indexación de rejilla, excentricidad del disco, excentricidad del rodamiento, errores introducidos por el dispositivo de lectura electrónica y la inexactitud de la parte óptica. La unidad de medición para determinar la precisión del codificador es el grado eléctrico, y la precisión del codificador determina la división de pulso del codificador. A continuación, utiliza grados eléctricos de 360 ° para representar la rotación del eje mecánico, y la rotación del eje debe ser un ciclo completo. Para saber cuánto ángulo mecánico equivale a 360 grados eléctrico, puede usar la siguiente fórmula para calcular: eléctrico 360 = mecánico 360 °/n ° pulso/
La precisión de los codificadores incremental depende de los factores mecánicos y eléctricos. Estos factores son: error de indexación de rejilla, excentricidad del disco, excentricidad del rodamiento, errores introducidos por el dispositivo de lectura electrónica y la inexactitud de la parte óptica. La unidad de medición para determinar la precisión del codificador es el grado eléctrico, y la precisión del codificador determina la división de pulso del codificador. A continuación, utiliza grados eléctricos de 360 ° para representar la rotación del eje mecánico, y la rotación del eje debe ser un ciclo completo. Para saber cuánto ángulo mecánico equivale a 360 grados eléctrico, puede usar la siguiente fórmula para calcular: eléctrico 360 = mecánico 360 °/n ° pulso/
 Gire A la imagen: Señal de marcha atrás A y B
El error de indexación del codificador se expresa por la desviación máxima de dos ondas de pulso continuas en ángulos eléctricos. Existen errores en cualquier codificador causados por los factores mencionados. El error máximo del codificador Eltra es de ± 25 grados eléctricos (en cualquier condición que se haya declarado), lo que equivale a una desviación del valor nominal de ± 7%. En cuanto a la diferencia de fase de 90 ° (eléctricamente), la desviación máxima de los dos canales es ± 35 el grado eléctrico es equivalente a aproximadamente ± 10% de desviación del valor nominal.
Codificador incremental de señal UVW
Además de los codificadores tradicionales mencionados anteriormente, hay algunos codificadores incremental integrados con otras señales de salida eléctrica. El codificador incremental integrado con la señal UVW es un ejemplo, y generalmente se utiliza en la retroalimentación de los servomotores de CA. Estas señales de polos magnéticos generalmente aparecen en servomotores de CA, y las señales UVW generalmente están diseñadas simulando la función de los componentes magnéticos. En el codificador Eltra, estas señales UVW se generan ópticamente y aparecen en forma de tres ondas cuadradas, que se compensan entre sí en 120 °. Para arrancar el motor, el arrancador utilizado para controlar el motor necesita estas señales correctas. Estos pulsos de polo magnético UVW se pueden repetir muchas veces en la rotación del eje mecánico porque dependen directamente del número de polos del motor conectado y se utilizan para señales UVW de 4,. 6 o más motores de poste.
Gire A la imagen: Señal de marcha atrás A y B
El error de indexación del codificador se expresa por la desviación máxima de dos ondas de pulso continuas en ángulos eléctricos. Existen errores en cualquier codificador causados por los factores mencionados. El error máximo del codificador Eltra es de ± 25 grados eléctricos (en cualquier condición que se haya declarado), lo que equivale a una desviación del valor nominal de ± 7%. En cuanto a la diferencia de fase de 90 ° (eléctricamente), la desviación máxima de los dos canales es ± 35 el grado eléctrico es equivalente a aproximadamente ± 10% de desviación del valor nominal.
Codificador incremental de señal UVW
Además de los codificadores tradicionales mencionados anteriormente, hay algunos codificadores incremental integrados con otras señales de salida eléctrica. El codificador incremental integrado con la señal UVW es un ejemplo, y generalmente se utiliza en la retroalimentación de los servomotores de CA. Estas señales de polos magnéticos generalmente aparecen en servomotores de CA, y las señales UVW generalmente están diseñadas simulando la función de los componentes magnéticos. En el codificador Eltra, estas señales UVW se generan ópticamente y aparecen en forma de tres ondas cuadradas, que se compensan entre sí en 120 °. Para arrancar el motor, el arrancador utilizado para controlar el motor necesita estas señales correctas. Estos pulsos de polo magnético UVW se pueden repetir muchas veces en la rotación del eje mecánico porque dependen directamente del número de polos del motor conectado y se utilizan para señales UVW de 4,. 6 o más motores de poste.
Uso : Ordenador
Número de modelo : KY-040 360 Degrees Rotary Encoder Module
Origen : CN(Origen)
Estado : Nuevo
Temperatura de funcionamiento : standard
Se puede personalizar : Si
Tipo : Regulador de tensión
2 : 360 Degrees Rotary Encoder Module
1 : KY-040 Encoder Module
Tensión de alimentación : 5V
Potencia de disipación : standard
3 : Encoder knob
Paquete : SMD
4 : KY-040 for arduino
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}